Hi,您当前浏览器版本过低,可能会影响浏览效果,建议下载使用感更好的浏览器,或者使用360浏览器极速模式浏览!
When talking about 3D LiDAR performance, it’s universally agreed that the parameters of LiDAR are important. Nevertheless, parameters are just the “fundamentals”! When working in complex traffic scenarios, LiDAR for self-driving cars needs to tackle various extreme working conditions comprised of high reflectivity objects, near-field obstacles, strong ambient light (direct sunlight), and interference from other LiDAR sensors, etc., which any of them may cause abnormal to the point cloud that may “fool” the processing algorithms and furthermore lead to tragic accidents. These extreme working conditions are “Corner Case”. How to detect, recognize, and solve the puzzles of these extreme conditions systematically to a large extent, tests LiDAR suppliers’ “extended ability” to build LiDAR sensor performance.
RoboSense has cooperated with a vast number of customers based on mechanical LiDAR products and has collected a huge amount of road test data of commercialization solutions in the past 6 years, Based on which, through comprehensive analysis and systematic optimization, RoboSense has developed a series of patented technologies in solving corner cases and has successfully implemented these technologies in the automotive grade solid state LiDAR product RS-LiDAR-M1. Taking the RS-LiDAR-M1 as an example, RoboSense has focused from the product side to eliminate the tricky problems for the industry to ensure safe and reliable point cloud data output.
“Ghosting” and “Blooming” of Point Cloud of High Reflectivity Objects
In actual driving scenarios, objects with high reflectivity are very common, such as traffic signs. Automotive LiDARs are very sensitive to high-intensity signals reflected back to them and easily produce "ghost objects" and " blooming " in the point cloud.
When an actual high reflectivity object enters FOV of 3D LiDAR, except that the actual shape of the object at its right place, “ghosts” point clouds of the object with the same or similar shape and size will appear at other places in the point cloud map. For different types of LiDAR sensors, the location of “ghosts” in the point cloud map might be different.
△Abnormal Point Cloud with “Ghosts”
△ Normal Point Cloud of High Reflectivity Road Sign Output by SOP Version of RS-LiDAR-M1
Point cloud “blooming” effects usually refer to the point clouds outline of a normal high-reflectivity sign dilates to the surroundings, imaging a point cloud shape larger than the actual size of object point cloud out to be, and the reflective intensity of the extra point cloud will be lower.
△Obviously Dilated Point Cloud of Highly Reflective Road Signs
△Clean and Clear Point Cloud Outline of Highly Reflective Road Signs Output by SOP Version of RS-LiDAR-M1
Point Cloud “Distortion” and “Missing”
Near-field obstacles detection is also very useful in intelligent driving, for example, for Traffic Jam Pilot(TJP) function, with smaller minimum detection distance, autonomous vehicles can shorter the following-up distance between vehicles, therefore to prevent the close cut-in.
A medium-to-long distance LiDAR sensor detects objects at close distances, problems of point cloud “distortion” (inaccurate ranging) and point cloud “missing” (object undetectable at certain distances) has long plagued the industry. The above problems usually occur is set as the "blind spot", and the point cloud data of which is not recommended for adoption.
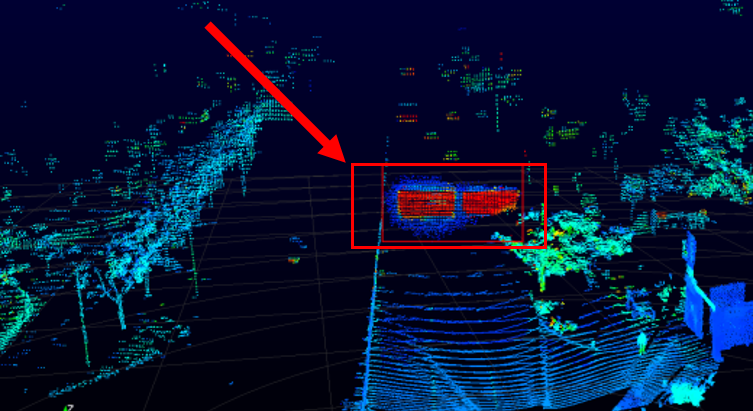
△Distorted Point Cloud of Objects at a Close Distance
Through optimizing the optical system and signal processing system, the RS-LiDAR-M1 has reduced blind spot zone to 0.5 meters; for most of the higher reflectivity objects such as vehicles' license plates, blind spot zone has been reduced to 0.3 meters, which can effectively help the intelligent driving system to reasonably control the distance to vehicle or other obstacles ahead.

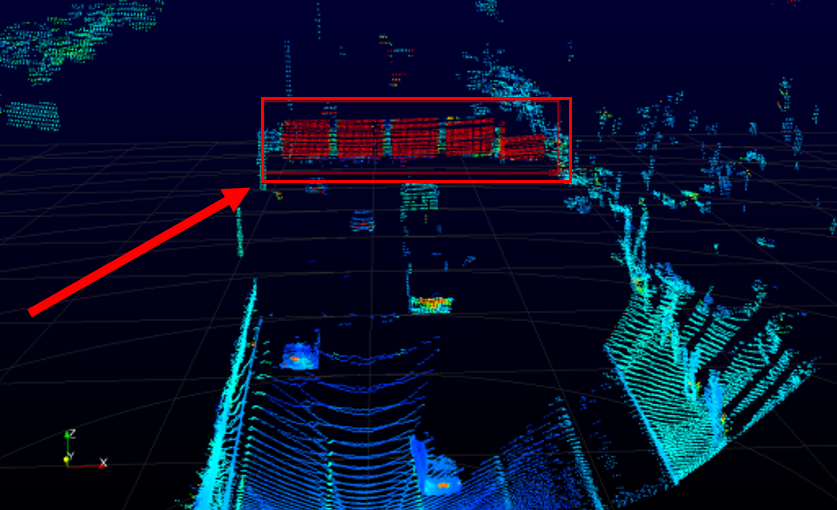
△The SOP version of RS-LiDAR-M1 Can Accurately Detect Obstacles in Close Distances
By comparing the two point cloud images above, that ranging accuracy of the SOP version of RS-LiDAR-M1 is very high: scanning of the ground point cloud and wall point cloud are veryclear. In actual uation, the ranging accuracy of the SOP version of RS-LiDAR-M1 has reached ±3cm (1sigma), enabling to delineate the contours of environmental objects accurately.
“Missing” point cloud refers to the phenomenon that point cloud of a short/low obstacle in a close distance “appears and absents” while LiDAR sensor approaches the obstacle from far to near. The “appears and absents” of original point cloud impedes the algorithms from continuously objects tacking, which may easily cause the intelligent driving system to enact sudden braking or frequent "deceleration and acceleration".
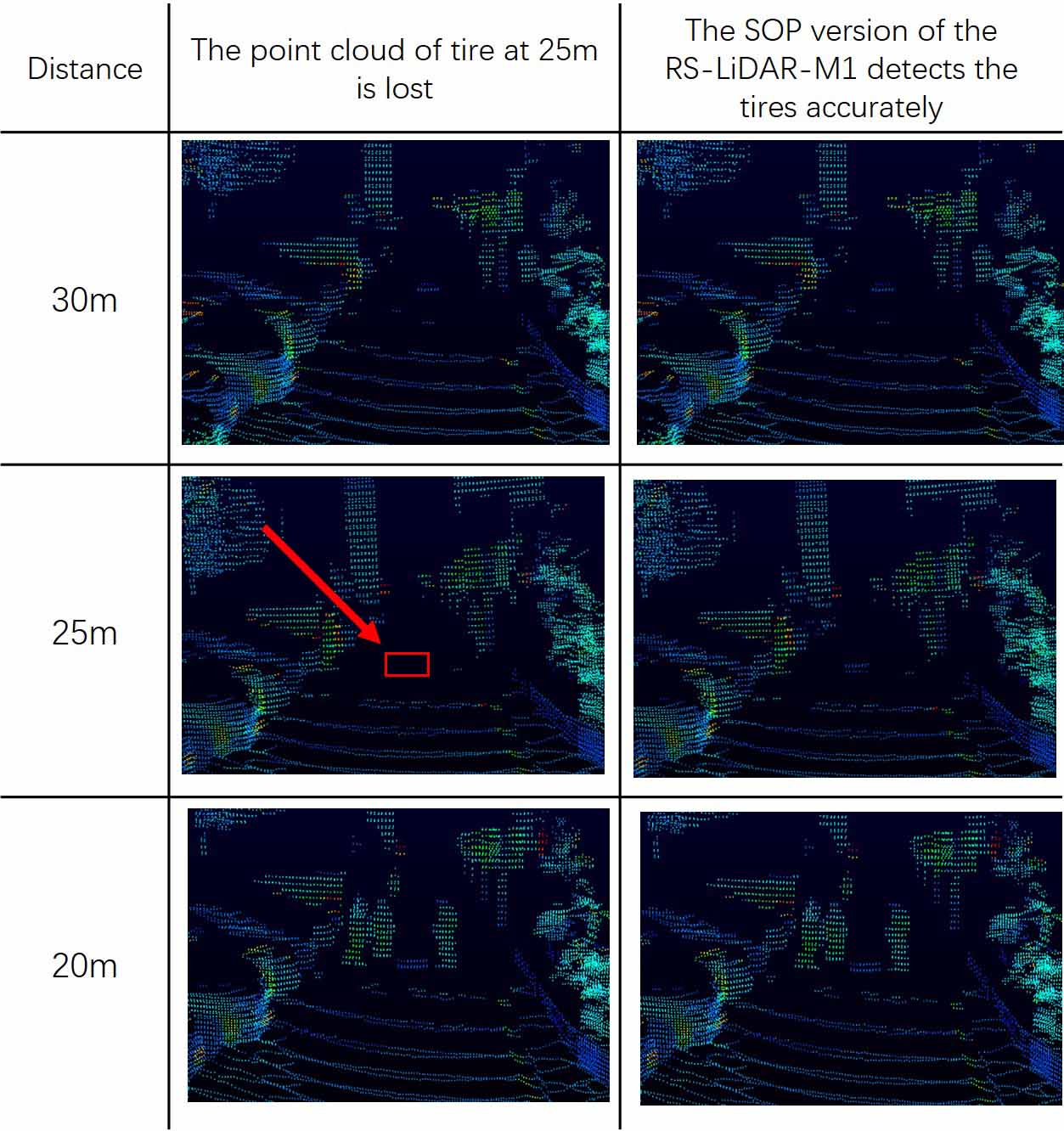
△Detection of tire lying on the ground in a close distance at 25m, point cloud on the left shows a "hole" where tire is lost, point cloud of SOP version of RS-LiDAR-M1 on the right has detected the tire accurately at different distances.
Interference from Sunlight
Strong sunlight is one of the autonomous driving LiDAR’s ambient light interference sources. When vehicle is driving towards the sun with the LiDAR’s window directly facing the sunlight, obvious noise will appear in the 3D LiDAR’s point cloud if processed inappropriately.
RoboSense adopts an innovative signal processing strategy and optical system design according to the mounting position and system functions of the vehicle, so that RS-LiDAR-M1 can minimum the impacts of strong sunlight interference.
△Noise-free point cloud collected from the SOP version of RoboSense RS-LiDAR-M1 facing the sun
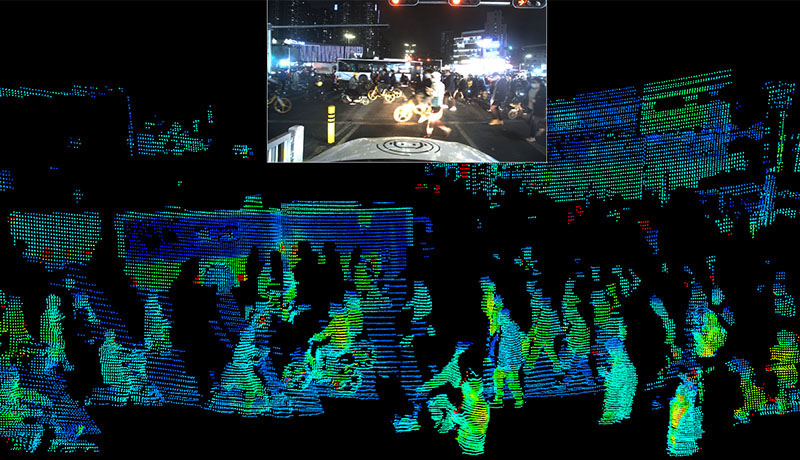
Multiple LiDAR Crosstalk
When sensing LiDARs are facing each other, the transmitted and received pulses from different LiDARs are easily confused, resulting in noise in the point cloud. RS-LiDAR-M1 uses unique technologies to filter out laser pulses from other self-driving LiDAR sensors to prevent multiple LiDAR crosstalk.
△The large screen on left shows the real-time LiDAR point cloud of the SOP version of RS-LiDAR-M1 with anti-interference function;
The right screen shows real-time LiDAR point cloud without anti-interference function
Point Cloud Quality Readiness: Excellent LiDAR Parameters
RS-LiDAR-M1 has super high point cloud quality, also with excellent ranging performance. The ranging performance of RS-LiDAR-M1 has reached more than 150m for 10% reflectivity targets (up to 200m for vehicle targets), it can accurately and stably detect a black vehicle without high reflectivity license plate and tail lights at 150m away! RS-LiDAR-M1 is also excellent in near-field detection. Even highly reflective objects at 0.3 meters in front can still be effectively detected.
With high ranging capability combined with resolution of 0.2°x0.2°, RS-LiDAR-M1 can detect a car at a distance of 150m in front and present image of 4 lines and 13 points, which is much higher than detection image threshold of 2 lines and 3 points required by perception algorithms. In the meantime, RS-LiDAR-M1 supports dual echo function with maximum amount of laser points per second up to 1,500,000.
At present, the factory inspection indicators of basic performance of RS-LiDAR-M1 including good-value LiDAR ranging ability, accuracy, field of view, blind spot, etc. have been aligned with the standards of automotive OEMs and frozen. Mass production products will be shipped in batches in accordance with above performance indicators.
About RoboSense
Founded in 2014, RoboSense (Suteng Innovation Technology Co., Ltd.) is the leading LiDAR company of Smart LiDAR Sensor Systems incorporating LiDAR sensors, AI algorithms and IC chipsets, that transform conventional 3D LiDAR sensors to full data analysis and comprehension systems. The company’s mission is to possess outstanding hardware and artificial intelligence capabilities to provide smart solutions that enable robots (including autonomous vehicles) to have perception capability more superior to humans.
http://robosense.ai/
 Building 9, Block 2, Zhongguan Honghualing Industry Southern District, 1213 Liuxian Avenue, Taoyuan Street, Nanshan District, Shenzhen, China
Building 9, Block 2, Zhongguan Honghualing Industry Southern District, 1213 Liuxian Avenue, Taoyuan Street, Nanshan District, Shenzhen, China service@robosense.cn
service@robosense.cn 0755-8632583046057 Five Mile Rd., Plymouth, MI 48170800 West El Camino Real, Suite 180, Mountain View, California 94040rsi-office@robosense.aiWhistleblower Email:voice@robosense.ai
0755-8632583046057 Five Mile Rd., Plymouth, MI 48170800 West El Camino Real, Suite 180, Mountain View, California 94040rsi-office@robosense.aiWhistleblower Email:voice@robosense.ai


